After considerable thought and discussion, the Society is suspending Scholarship awards in all three regions – North America, Europe, and Australasia – for 2026. In the interim, we encourage you to consider one of our amazing internships. The Internship program will continue as usual with the application period opening on December 1, 2025.
OWUSS is taking this time to review the mission and goals of the Society and determine the best path forward. As we do so, we will seek enhanced engagement with our alumni, hosts, sponsors, and other interested parties.
For more information about the Our World-Underwater Scholarship Society, to make a much-appreciated donation, or to inquire about becoming a sponsor, please visit our website at www.owuscholarship.org, or email us at info@owuscholarship.org.
Officially Receiving the Dr. Lee H. Somers Internship from OWUSS President Vin Malkoski Photo Credit: Our World-Underwater Scholarship Society
Hi there, my name is Caden Delano and I am a marine science student from the University of Florida and an ichthyologist at the Florida Museum of Natural History. I would like to start off by thanking the Our World Underwater Scholarship Society (OWUSS) for giving me the honor of receiving the Dr. Lee H. Somers Scientific Diving Internship. My expectations and excitement for the summer internship consumed me for weeks as I prepared my travel plans to Washington. I was certain that my experience diving in Florida would serve me well, but I knew that the cold water, strong currents, low visibility, and task loading that I would be introduced to would serve to mold me into a skilled diver. I was grateful to have this opportunity and excited to begin!
OWUSS AAUS Interns standing with Heather Albright and Vin Malkoski. Photo Credit: Our World-Underwater Scholarship Society
I connected with many inspired OWUSS members during the 51st Annual Awards Ceremony in New York City and watched the quality presentations of my peers. That same enthusiasm was found at the Shannon Point Marine Center, where I obtained my scientific diving certification, aided in abalone conservation research, and conducted young of the year (YOY) rockfish surveys under many inspired scientists. In addition to thanking the OWUSS, I would like to extend my gratitude to the American Academy of Underwater Sciences (AAUS), Shannon Point Marine Center (SPMC), and Fourth Element for supporting me throughout my summer internship. Every one of these organizations welcomed me with open arms and made my summer memorable.
I arrived in Anacortes, WA and immediately met one of my mentors, Dr. Derek Smith! Derek was eager to ensure I had everything I needed to succeed upon arriving. He also entertained me with stories from his time studying marine science around the globe. I can confidently say that I have now gained a few of my own stories from my experience this summer.
SPMC scientific diving team. Photo Credit: Dr. Derek Smith
One of my peers, Lily Moore, and I received our brand new wetsuits, booties, and gloves in the mail, courtesy of Fourth Element. Upon testing them in the water we found that they fit nice and snug while keeping us warm in the 50℉/10℃ waters of the Salish Sea! The rest of the gear we needed to conduct research this summer was graciously provided by Dr. Nathan Schwarck and the SPMC dive locker. We started our scientific diving training in the Fidalgo Pool & Fitness Center and created a team of dependable divers along the way.
The 2025 SPMC Scientific Diving Class 2025 presenting their cleanup dive haul. Photo Credit: Western Washington University Lake Whatcom Staff
After our pool training we kicked off our summer scientific diving program by doing a cleanup dive at Lake Whatcom. Navigation was difficult in the murky water with little to no natural landmarks to guide us. Nate didn’t have a problem navigating right to us, a skill we continued to work on throughout the summer. By the end of our dive we were flush with golf balls, but the most notable was a Western Washington’s Student wallet and ID found by Derek.
Our dive training continued as we learned how to handle heavy objects underwater with lift bags. This training was particularly helpful because the scientific diving team was later tasked with retrieving three artificial reef modules after they had been submerged for a one year period. They were held down by heavy cement bricks, and were completely covered in algae that blended into the rest of the sea floor. To make things worse, we could only dive on the slack tide, otherwise the current would take us faster than we could kick. We had to use our navigation skills, teamwork, and lift technique to successfully retrieve them in our 10 minute window, but the good news is we had two slack tides in the day. Our first attempt was demoralizing. We retrieved one of the reef modules, but the current fought us soon after. We needed to take half the amount of time to grab the next two modules, so we formulated a plan. The OWUSS Mitchell Scientific Diving Intern Lilly Moore was especially helpful and took charge of the operation. A well defined plan was exactly what we needed in order to work in quick succession and get the other two reef modules out of the water.
While we had gotten experience lifting heavy objects out of the water, in the dive rescue certification course we took turns lifting our “unconscious” buddies out of the water! We also practiced CPR and the use of AEDs in the event of a dive emergency. The instruction provided by Dr. Smith and Capt. Schwarck was invaluable and exceeded the standards of a classic rescue diver scenario. The challenging conditions of the Salish Sea such as the frigid waters and rocky shores created the perfect training grounds. I came out of that course knowing I’ve prepared for the worst so I can meet future challenges at my best.
Deception Pass State Park, WA. Photo Credit: Dr. Brian Bingham
Dr. Brian Bingham led the Research students and OWUSS/AAUS interns on a hike around Deception Pass, a breathtaking landmark with astonishing currents and an interesting history of deceiving Captain George Vancouver into thinking it was a bay or inlet.
Juvenile Pinto Abalone
A few weeks later marked the beginning of our research focus. Our shipment of 2,867 juvenile abalone arrived, and with it, a responsibility to keep them alive. The first week after they arrived we noticed the abalone made a habit of climbing out of their sea tables and desiccating, so our young team of scientists rotated checking on the abalone and placing them back in the water until they grew accustomed to their new environment. They were fed with dulse seaweed and their tanks were cleaned as necessary. This experience was a great introduction to husbandry, a skill I expect to use more often in the field of conservation research.
Strawberry AnemoneStellar Sea Lion
One of my favorite dives this summer was when the 2025 SPMC Science Diving Class visited the legendary Strawberry Falls dive site, famous for its thriving strawberry anemone population and high biodiversity due to its proximity to the open ocean. On our ascent, I heard a muffled scream through my dive buddy’s regulator at the same time that a torpedo shot past us. I captured a blurry picture of what turned out to be a curious Steller sea lion as it swam by. Seeing a sea lion underwater checked a box off my bucket list!
A unique opportunity to go out on the WDFW law enforcement boat was a great insight into how science and public safety collide. Seeing how organised and structured their dive operation was, was inspiring. We saw a pod of orcas from the boat containing two fully grown males whose fins stood proudly tall above the water line for many moments before sinking below the untouched surface. It was such a magical experience. After they finished their dive to collect sea cucumbers, I got to help them with taking length measurements which involved splitting them open and pulling their insides out. This was an odd experience since at depth they seem so tough but when you open them on land and release the water pressure they are really just fleshy moulds. We then weighed their gonads which became a part of a larger dataset that will inform them of whether to change the dates of the fishery.
Credit: Lily Moore
Caption: The WDFW police boat I went out on to observe their sea cucumber collection
Samish Indian Nation Dive Team
Another project I had a more hands-on role for was a collaborative effort to pick up artificial reef module systems (ARMS) which had been laid down a year prior. They are essentially mini apartment buildings for organisms which was an amusing site. The task of recovering these ARMS was a 2 day event. The first day I went out with the Samish Indian Nation dive team in order to do recon and get a good idea of where exactly they were laying after being in the field for a year. This was my first ocean dive in Washington. I had anticipated the cold, but nothing prepared me for my first breath after my head was submerged. I’ll never forget the sound of the ice cold water seeping into my wetsuit hood… which quickly became one of my favourite sounds ever after I fell in love with the kelp thickets, sea lions, and cold water reefs that Washington has to offer. What a great introduction to PNW diving! The second dive day was to consist of actually rigging and lifting the ARMS out of the water. This, however, did not go exactly to plan. There were strong currents and my fellow divers were newly certified from the dive program at SPMC and as such didn’t have the experience to handle these conditions yet. We gave it our best shot but in the end had to call the dives and return to shore. This was the first of many times this summer that I learned that science doesn’t always go to plan. (a WDFW team returned a few days later and were able to retrieve them).
Proficiency Dives
SPMC is lucky enough to be in close proximity to Walla Walla University’s Rosario Beach Marine Lab where Dr. Allan Verde and Dr. Jim Nestler conduct their scientific diving program. I teamed up with them and a couple of their students to go on proficiency dives most weekends. This experience gave me the opportunity to dive at Keystone which is a unique shore diving site next to a ferry terminal, known for its abundant marine life including giant plumose anemones, diverse nudibranch species, and even plentiful octopus gardens. This is by far my favourite dive site of all time. I dove there often with Tabi from the State Park Service and Joe from NOAA who are such knowledgeable and skilled divers. I learned a lot from these proficiency dives such as how to read tide and current tables and to determine if conditions are safe to dive at a site. I learned to slow down while diving and peek into every crevice because you never know when 2 little eyes might be poking out at you belonging to the elusive giant pacific octopus (GPO). I had read all about them before diving there and was desperately excited at the prospect of finally seeing one, since I had been dreaming about them ever since I was a little girl… but to actually see one in person was like nothing I’ve ever experienced before. I was truly and totally enthralled by it. I sat in front of one den for half of a dive and only swam away because I reached my turn around pressure. I could have watched it for hours; the way its tentacles unraveled and its siphon periodically swayed open and closed, they’re incredibly rhythmic and mystical creatures. After each dive I felt I surfaced with more questions about them and it would keep me returning each week even when I had to wake up at 4am to make the slack tide.
Credit: Lily Moore
Caption: left – Keystone dive site, middle – Tabi & Joe before our Keystone dive, right – the first Giant Pacific Octopus I saw (I named her Daphne)
Sessile Jellyfish Research with Nate
The DSO at SPMC took me and the other OWUSS intern (Caden Delano) to Possession Point State Park on South Whidbey Island where we were looking for Aurelia sp. Jellyfish polyps in their sessile phase as a part of Nate’s personal research. This dive site was unique in 2 ways: firstly, it was a beach where you are stood in 7ft of water and then suddenly it drops off to almost 300ft of water almost immediately; secondly, it was an estuarine environment meaning that it was not rocky (as most of Washington’s coastline is) but sandy. Unfortunately this dive was another lesson in how science doesn’t always go to plan because we were unable to locate the polyps. However, I had a truly magical experience at the start of the dive as well as 50ft of visibility (unheard of in Washington) which made the trip worthwhile. As we completed our buddy checks on the surface, I heard the unmistakable sound of a large mammal’s blowhole… I paused midway through checking my BCD deflator and dumps to see the tail of a humpback whale descend gracefully not far from where we were. We completed buddy checks and remained on the surface for an additional couple of minutes to watch as the whale surfaced another few times. Our slack tide timings were specific however, and it was time to descend. As the familiar woosh of cold water seeping into my wetsuit hood hit my ears, it was drowned by another, unfamiliar sound. We all looked at each other confused for a second before our eyes lit up in turn as we realised it was the sound of the humpback emanating throughout the water column. As it continued to sing I breathed in the moment and noted how its tone was simultaneously high pitched and deep; a sound I could never re-create with my human vocal chords.
Credit: Lily Moore
Caption: Me and Caden after hearing our first humpback whale underwater.
Abalone restoration
SPMC hosts a number of Research Experience for Undergraduate (REU) students each summer in addition to the 2 OWUSS interns, a couple of whom were a part of the scientific dive class and subsequently conducted an underwater research project which I was able to be a part of. We collaborated with Puget Sound Restoration Fund (PSRF) who gave us almost 800 pinto abalone to experiment on and outplant, as well as funding to complete our research.
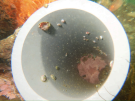
Pinto abalone (Haliotis kamtschatkana) populations remain critically low despite ongoing restoration efforts. To improve outplanting success, we tested the effectiveness of clear and opaque tubes on abalone dispersal rates and evaluated the predatory behavior of Amphissa columbiana toward healthy and injured abalone. In field trials, clear tubes resulted in significantly faster dispersal rates than opaque tubes, suggesting that increased light exposure may encourage abalone to leave the tubes more quickly and integrate into the natural habitat, potentially improving survival. Laboratory choice experiments showed that A. columbiana did not actively prey on healthy abalone, but significantly preferred injured individuals. This highlights the importance of minimizing injury during handling and transport. These findings suggest that the use of clear tubes and gentle handling protocols may enhance the effectiveness of current abalone restoration strategies. Further research is recommended to explore the benefits of nighttime outplanting, alternative tube anchoring methods, and predator exclusion during outplanting to support long-term recovery of this threatened species.
The field trials mentioned were conducted as a 24 hour dive protocol. We had a team of 12 divers who took it in shifts to count and observe the movements of the pinto abalone out of the tubes every hour on the hour for 24 hours. This dive expedition brought many challenges with it including how to keep people safely warm, fed, and dry between shifts as well as how to account for varying ocean conditions over a 24 hour period. As such, it was a great experience to plan such a dive because it gave me an excellent insight into everything which must be accounted for when you are leading a dive, like I’ve never experienced before.
Credit: Lily Moore
Caption: pinto abalone waiting in a tank at SPMC to be outplanted. Abalone were separated by family to ensure members of each family were mixed into each tube to increase diversity on the seafloor
Credit: Lily Moore
Caption: pinto abalone lined up on a towel to be tagged with glue and a brightly coloured miniature bee tag with a number on it for future retention surveys.
Credit: Lily Moore
Caption: the dive site setup. Left – numbered opaque tube placed on the reef; middle – abalone leaving the tube after a few hours in the field; right – one corner of the dive site which we plotted with measuring tapes and line with a corresponding number of knots based on which corner of the plot it was in (the same setup that PSRF uses).
Credit: Lily Moore
Caption: Me and the core dive team for the 24 hour dive on our surface intervals keeping morale high.
Credit: Lily Moore
Caption: We had a number of other visitors to the outplant tubes including sea urchins and Amphissa snails which are pinto abalone’s number one predator; a part of our project was to document and examine the relationship between the two snail species.
Rockfish surveys
A researcher at SPMC was conducting rockfish surveys on what their depth and size is throughout the San Juan Islands as a part of a very large dataset on them. I had the opportunity to dive with her on a multilevel dive to collect length and depth data in the local area nearby Rosario Beach. This was a great way to connect with other scientific divers at SPMC and emphasised the vastness of what can be researched in the ocean since it was so different to everything else I had done so far.
GPO collection dive
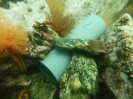
A local aquarium required SPMC divers to collect a GPO for their exhibit which had recently lost its resident GPO. This dive required a lot of planning and was another example of how science cannot always work in our favour – sometimes the ocean has other ideas and we, as humans, must respect that. Myself and a small group of divers had planned this dive thoroughly, gathered all of the necessary materials including multiple nets, fresh water in bottles to wash the GPO out, a knife to open up a clam underwater as an offering to the GPO, as well as the exact location of the GPO in a tire reef (as shown in the image), conditions were as calm as we could have ever hoped for, tanks were filled and we were ready. But GPOs are masters of disguise. No one can capture a GPO once it has decided it’s time to escape, they are true artists of contortion and deception. We had no chance against it in the maze of tires and had to allow the ocean to keep its mysterious creature. I left that day with a great deal more respect for the creatures which I had come to love and appreciate throughout my time in Washington. The aquarium was able to acquire a juvenile GPO from Walla Walla university which had captured one accidentally in a bottle through their research on ruby octopus earlier in the summer.
Credit: Lily Moore
Caption: left – perfect calm conditions the day of the collection dive, right – the maze of the tire reef which housed the elusive GPO we were unable to capture
Friday Harbor Labs Lime Kiln Lighthouse
A visit to Friday Harbor Labs brought the opportunity of diving the hydrophone site at Lime Kiln Lighthouse about. We followed the thick cables down from the rather dicey shore entry to where the hydrophones lay and pick up everything from orca vocalisations to ship disturbances to myself and Caden singing a rather bubbly rendition of “Under the Sea” from The Little Mermaid whilst on our dive. Our mission for this dive was to take a video recording of both hydrophones and cables as monitoring; since no one had been down to check on them in a while. Through talking to the hydrophone lab manager, I learned that they are working to reduce vessel speeds in many areas in order to reduce decibel levels which when too high, can interfere with vital whale communication.
Credit: Lily Moore
Caption: left – me geared up before the dive at Lime Kiln Lighthouse, right – the hydrophone lab which we had the honour of visiting.
Helping with the Shannon Point Marine Center scientific diving class taught me three main things: always discuss the dive plan in-depth before descending, never underestimate a student’s ability to lose their dive equipment, and that science is the best when you’re wearing neoprene. Whilst I have worked as a recreational divemaster, assisting with a science dive class was a totally different experience because it demands so much more of the students. I was paired with the newer divers to work on helping them feel comfortable doing their basic skills in the pool. It was a good experience to have to employ different methods of empathy, sincerity, and firm instruction in order to reach each person on their level and get them to do their skills with a smile on their face. Each day came with its own challenges but the supportive atmosphere of the class remained the same each day. My favourite thing to observe was when there was a student who was confused about how to do the BCD remove and replace skill underwater and another student who had just mastered it remained on that skill with him and kept giving tips and tricks until he could not only do it but felt confident doing it.
Credit: Derek Smith
Caption: the dive class team after a particularly challenging pool session with big smiles on our faces
The first open-water dive was at a lake, and as a simple introduction to science diving we did a trash cleanup. We found some very exciting objects such as a wallet with a $100 bill in it which just so happened to belong to a friend of one of the students in the class… you never know what may wash up. This day I learned the power of team work when it comes to the success of a dive. Some students were quite nervous about the dive and the ones who worked together to discuss their concerns ended up having a great time and ones who didn’t vocalise their concerns didn’t have as positive of an experience. After this, I began to go around each student individually at some point before the dive to make sure they didn’t have any concerns/questions. Not only did this help them feel more comfortable and make the dive objective easier to achieve but it also allowed for me to have a more personal interaction with them. As such, assisting with the class helped me develop my dive leadership skills.
Credit: Lifeguard at Lake Whatcome
Caption: the dive class after their first successful open water dive featuring our trash haul
A big part of my role in the dive class was to assist the DSOs with their prep and cleanup pre and post dives. I had no idea that there was so much behind the scenes work which had to be done to make a dive class run smoothly. We had to plan the dive locations based on the current and tide tables, as well as planning all of the equipment and tasks for the divers to complete, all of which needed to be done efficiently and safely. Through working in the dive locker I learned a lot about equipment handling. I assisted with tank visual inspections and performed simple gear maintenance tasks which taught me how to fix many common gear related issues and developed my general troubleshooting skills. After the class the DSOs and I spent many hours running tanks to and from the local dive shop to be filled which provided an insight into the true life of a DSO and allowed me some time to ask questions of them. In this time I learned how hard it is to manage a dive class and the stresses which come with such responsibility, in addition to the joy and enthralling stories which being in the ocean every day provides.
Credit: Caden Delano
Caption: left – me assisting DSO Nathan Schwarck with preparation in the dive locker, right – me assisting a student with post-dive boat breakdown
Whilst helping with the dive class was an overall joyful experience, it did come with some unique challenges. There was a day where we were doing a deep dive followed by a night dive and when we arrived at the deep dive location there was significant swell which meant we couldn’t put the bow door down of our front loading vessel and it made everyone feel seasick. Luckily, my sea legs were on that day and by some stroke of magic I was the only one who didn’t get seasick. As such, I found myself untangling weight belts, lifting gear setups onto people’s backs, coaching people through deep breaths, and putting on 12 sets of fins to prevent people from having to bend over while at their worst. That was challenging enough not to mention that 5 students had never done a back roll entry before, so in this swell I counted down “3… 2… 1” and with a slight push here and there, they all did it. The visibility on that dive was so bad that I was incredibly grateful for my dive light since once we hit 80ft it was essentially a night dive. Following that, the actual night dive was hilarious. It was what can only be described as “The Shrimpening”, the photo says more than I can with words but it was like swimming through pure shrimp. There were also a number of dives where I felt the true power of the ocean in the form of strong currents. Coming from Florida, I had never really experienced anything as intense as these tidal changeovers. As such, being a leader in this class helped me to gain a lot of experience in varying dive conditions and to learn the extent of my limits as a diver.
Credit: left – Lily Moore, right – Nathan Schwarck
Caption: left – it’s raining shrimp!, right – the dive class post night dive feeling accomplished
Overall, helping with the dive class helped me become a more confident diver in harsher conditions and allowed me to develop my skills as a dive leader. But most importantly, to learn how to lift other divers up and make some lifelong friends.
I saw my first turtle in the Maldives before the seaplane even landed. Bleary-eyed after 40 hours of non-stop travel, I was initially convinced that I was seeing things, but as I continued peering out across the reefs, the shape became unmistakable: a turtle surfacing to breathe, enormous even when viewed from far above. Seconds later, it fell away from view, replaced by vibrant reefscape, as the plane circled my new home for the next few months, the resort Six Senses Laamu.
Above: A green sea turtle munches on the seagrass meadows that surround Six Senses Laamu.
I’m still pinching myself that I get to stay here, in one of the most biodiverse regions in the Maldives! As the second part of my OWUSS internship, I’m working for the Maldives Underwater Initiative (MUI), a cutting-edge marine biology center based at the resort. The team of scientists here spearheads research projects from seagrass surveys to manta monitoring, alongside guest and community education programs. MUI also partners with three non-profits – the Manta Trust, the Olive Ridley Project, and Maldives Resilient Reefs – establishing the center as a powerhouse of marine research in the region. As a new intern, my main role is to help document their science in action.
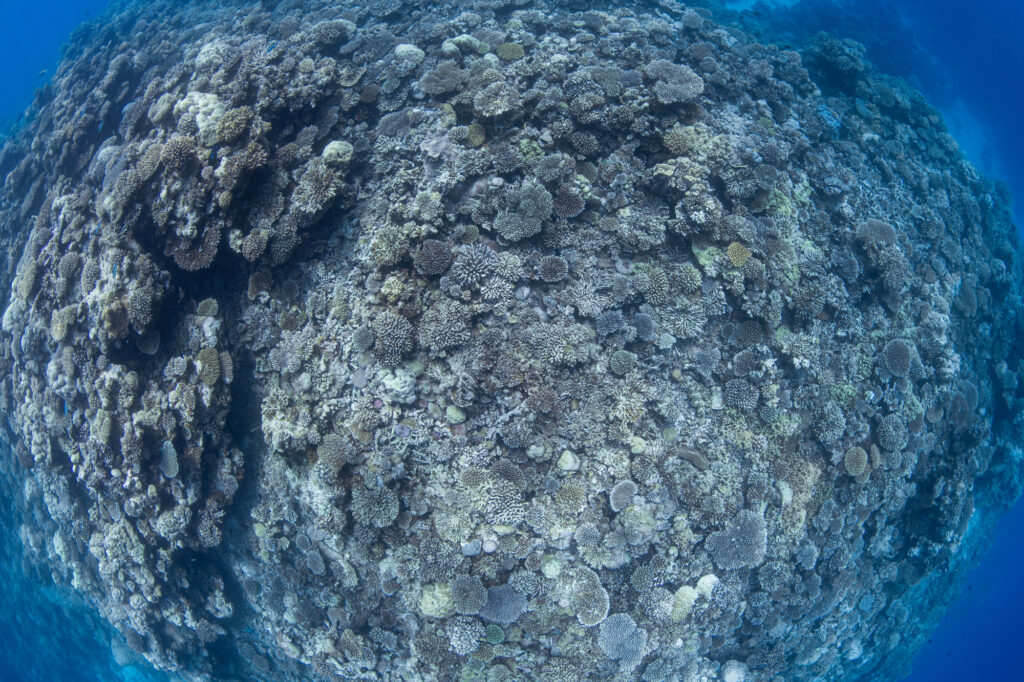
My first week or so here passed by in a blur – settling in, meeting the team, hotel orientations, and of course absorbing as many marine biology facts about Laamu as humanly possible. But my first snorkel was absolutely unforgettable. I jumped in from one of the hotel jetties, intending for a quick dip just to explore. Almost immediately, I was face-to-face with one of the healthiest reefs I’d ever seen, blanketed by corals stretching off into the deep blue distance. Fish zipped past me in all directions, a riot of bright colors and beautiful patterns. Just when I thought the excitement had peaked, the megafauna arrived: a couple of green sea turtles perched atop a pinnacle, a blacktip shark on the hunt, and even an enormous Napoleon wrasse! Inevitably, my “short snorkel” evolved into an hour-or-two escapade, and I arrived back looking both very pruned and very happy at the thought of my upcoming time here.
That snorkel made me realize just quite how far my baseline has shifted for healthy coral ecosystems. I’ve been lucky enough to dive on reefs all around the world, from the Caribbean to the Pacific, but the corals I’d previously encountered were always somewhat degraded, a patchwork of their former vitality. The only truly healthy corals I’d seen were in documentaries – the concept of a bustling reef seemed more a TV creation than a real-life possibility. But Laamu’s corals have transcended my baseline. Here, many nearby spots show near complete coral coverage, teaming with biodiversity across a vibrant, packed reefscape. This, among other factors, contributed to Laamu’s designation as a Mission Blue Hope Spot, a title given to special hotspots of marine biodiversity. Only 168 Hope Spots exist worldwide, emphasizing the pristine state of this atoll, sustaining marine life across the region.
Laamu’s reefs, bustling with life and biodiversity
The local reef had one more welcome gift in store that week, by far the most mind-blowing experience of them all: coral spawning. Just after a handful of full moons each year, four different species of coral will release all of their eggs and sperm into the water, in a spectacular display of nature’s coordination. The event lasts only a few minutes, during which the black water transforms into a sea of brilliant pink dots, like snow flying away from the reef. The eggs and sperm mix into the water column, fertilizing them upon contact, sustaining the next generation of the reef. Here at MUI, we take that process one step further. During spawning, the team deploys around 20 cones over the spawning corals, designed to collect the eggs and sperm released. Our scientists then gather the catch of the cones and mix it at high densities, in turn can raise the fertilization rate by up to 80%.
The week after I arrived, our team checked a few of the coral candidates and discovered that a few Acropora species were packed with tiny pink eggs inside – a sure sign of imminent spawning. Thus began our night dive routine – each night during the possible spawning timeframe, a few of our team would dive along the reef, checking for signs of activity. We mainly looked for the so-called ‘coral setting’ – when a coral moves its eggs to the outside of its polyps, priming them for release. Fearing I’d miss the action, I jumped on every scouting dive that I could – I wasn’t about to miss this once-in-a-lifetime phenomenon!
Above: One of the Acropora corals our scientists sampled – the little pink dots are the coral eggs, a sure sign that spawning would happen within the next few days
On night three, the news of coral setting finally came in! I was at a welcome dinner for new staff, dressed up for the special occasion, when I heard. Within 20 minutes, I’d raced to the dive center, traded my dress for my dive gear, and descended for the night dive of a lifetime. The MUI scientists were already in full swing, searching for setting and deploying coral cones up and down the reef. I found myself a beautiful little acropora dotted with tiny pink eggs, set up my camera, and began the wait.
Above: An acropora dotted with tiny pink eggs, primed for release – this stage is known as coral setting Below: MUI scientists deploy the egg-catching cones over corals with signs of setting. Once our dive team identified evidence of setting, we had about a 45 minute window to deploy as many cones as possible, to maximize our egg collection.
Around 9pm, I noticed the first little dots starting to dislodge, delicately floating up and away. Moments later, in perfect sync, the coral polyps released their eggs all at once, and hundreds rose into the water column like reverse snow. The sight was otherworldly, pink dots flying in all directions, the ultimate egg-splosion. I snapped away, trying to capture every second, and absorb the magic of the moment myself too!
Above: A coral releases it’s eggs into the water column, slowly at first, then all at once: an egg-splosion of little pink dots. These photos were taken in the moments of peak spawning.
The show was over as quickly as it began – within five minutes, the eggs had drifted away, to begin the process of fertilization. But for our team, the work was only just beginning. Our dive team started by retrieving all 20 of the deployed cones, now filled with captured eggs. Upon sealing the cones shut, the surface support team dove down to bring the cones to the surface, appearing left and right like freediving phantoms. Back on land, our scientists then mixed all the cone contents together, a soupy concoction of eggs and sperm, fertilizing to become the next new corals on our house reef.
Above: A deployed coral cone, post-spawning – the pink eggs are visible within the mesh netting.
Above: Talia, a MUI intern, collects three egg-filled coral cones to bring to the surface.
Above: Hadin, our coral researcher, stirs the eggs to improve fertilization. A close-up of the coral eggs in our fertilization bucket.
After an hour or so of incessant stirring, one of our scientists beckoned me over – she’d found the first signs of life! Peering through the macro camera, I saw a handful of so-called “coral butts,” the first cell division of each of the newborn corals. Success!
Above: A close-up of the coral eggs – looking closely, you can see lots of ‘coral butts,’ the first signs of fertilization
Within a week, the “coral butts” had morphed into coral larvae, microscopic little dots roving around our tanks, ready for new beginnings – our scientists released them right on our house reef, in hopes that they settle nearby and enrich our local ecosystem. Efforts like this are even more vital given the fine line between reef health and degradation. Just two years ago, Laamu’s reefs experienced a devastating mass bleaching event, affecting a significant amount of corals across the atoll. While many have bounced back remarkably, their resiliency to future heat stress remains to be seen. Through our restoration, the MUI team hopes to keep our corals firmly on the side of healthy, bolstering our reef with influxes of baby corals and hopefully strengthening its chances against ocean warming.
From my very first boat dive of the Backscatter Digital Shootout, I knew I was in for the experience of a lifetime! I arrived at the docks bright and early for our 7:30am departure, to find what can only be described as a full-on underwater photography invasion: kitted-out camera rigs as far as the eye can see, boats brimming with fresh tanks, and photo and filmmaking legends I’d admired for years there before my eyes. And I was about to dive alongside them, to spend two weeks learning everything I could from them – quite simply a dream-turned-reality!
It all began a few weeks prior, when perhaps the heaviest package I’ve ever received arrived at my doorstep from the Backscatter team, full of demo gear for me to test out during my internship. Christmas definitely came early this year – inside was all the kit and accessories I’d need to assemble a professional-level camera rig, ready for Bonaire! For the first time, I’d have a photographer’s dream toolkit at my fingertips, an incredible opportunity to push my skills and creativity in the coming weeks.
The incredible camera rig that Backscatter generously lent to me for the Digital Shootout! Photo credit: Christina Chapman
Fast-forward to my first day at the shootout, and I found myself aboard a dive boat called the Pressure Drop, surrounded by other eager photographers, splashing in for my first dives in Bonaire. From the moment I descended, I was mesmerized by the reef, with its flowing soft corals and bustling activity. With every dive, a new critter seemed to emerge, from juvenile Spotted Drumfish to majestic Eagle Rays, from shoals of squid to swirling baitballs.
A massive green moray eel slithers along at the base of Salt Pier. This site is actually an active salt pier, as well as one of the most famed dive sites in Bonaire, for good reason – each pillar of the pier is packed with life, quite literally creating a vertical reef from the seafloor to the surface!
A close-up of a juvenile drumfish, one of my favorite species to spot in Bonaire – this one was barely an inch long!
A spotted moray, peering out from a crevice in the reef.
Even the water itself blew me away – as a California diver, I’m conditioned to the cold temperatures and lower visibility of our dives, and while I adore our kelp forests, there’s something truly magical about reefs stretching out as far as the eye can see. And with my camera in hand, I couldn’t wait to capture it all! It was the perfect playground for my photography, for experimenting with new techniques and perspectives.
A Sharp-tailed Eel on the hunt – this one let me follow along for my entire dive, as it slithered through the reef in search of an afternoon snack
Each day of diving was followed by an evening of seminars from the Shootout pros, covering everything from the basics to advanced techniques. As someone who had never taken a formal photography class before, I had always found myself admiring the work of pro photographers, wondering how they created such mesmerizing images. Now, I had them right in front of me, open to answering all of my questions. As they gave their lectures, I tried to absorb every ounce of their experience, from the strobe positioning strategies of Jim Decker, to Lightroom magic from Erin Quigley, to the wide angle wisdom with Berkely White. I even got the chance to sit down with the one-and-only Cristian Dimitrius and review some of the filmmaking highlights of his career, quizzing him on how he’d created such amazing shots and storytelling. An incredible learning experience! Before long, listening to the pros started to shift my mindset underwater – I found myself taking a moment before shooting a subject, looking for more interesting details or behaviors that could bring together a story. I began taking images with intention, and I saw my photo skills accelerate more in days than they had in years.
The otherworldly eye of a balloonfish
For week two, I decided to shift my focus to video, something I’d only ever dabbled in prior to the shootout. But with aspirations of pursuing wildlife filmmaking, I knew this was the perfect opportunity to develop my knowledge and skillset. With the help of the Shootout team, I dialed in my settings and soaked in everything I could on all of the angles, elements, and editing that weave a wildlife story together. Thanks to Backscatter’s gear team, I even got to try out a video monitor – it was like watching a TV screen underwater!
After a week of video practice, everything finally came together on one of my last night dives of the trip. The aim was to shoot a species called tarpon on the hunt – as the night patrol of Bonaire’s reefs, they snap up any unlucky fish that stray into open water and, clever as they are, often take advantage of our bright dive lights to illuminate their prey. This in mind, Cristian had set out a raft of Keldan lights, coined the ‘moonpool,’ to serve both hunters on the reef that night: 1) providing a beautiful ‘fake moon’ lighting for us story-hunters and 2) attracting the attention of every hungry tarpon in the area. By the time I splashed in, the action was in full swing, with swirling schools of baitfish, bound by the swooping passes of 5-10 tarpon. It was absolutely breathtaking! Drawing on the past two weeks, I focused on capturing the spooky atmosphere of the scene, from the tarpons’ roving eyes to the baitball pulsing with every tarpon attack – I ended up as the last one in the water, with a front-row seat to all the action! The footage was ultimately my favorite from the trip, and I decided to put together a short video from the dive (linked to the ‘play’ button on the image below).
Tarpon on the prowl, surrounded by schools of baitfish. Click on the ‘play’ button to see the full video!
However, for me, the most special part of the Digital Shootout was meeting so many people from the diving community, from the incredible Shootout pros to fellow participants from all over the world. I was endlessly inspired by the creative ideas and storytelling of everyone around me, and I left the Digital Shootout with so many amazing memories and new friendships. In particular, a huge thanks to friends and crew from my dive boat, for being the most awesome dive buddies for these two weeks. To the Nauticam team, thank you for all your guidance and for entrusting me with your incredible gear. And to the teams at Backscatter and New Media Soup, thank you for running such an incredible event and for all of your invaluable mentorship. I will be forever grateful for your support with this opportunity of a lifetime.
Finally, a very special thanks to Linda Schutt and OWUSS, whose generosity makes this incredible internship a reality!
The self-proclaimed “Badass Lady Shooters” squad! Among many amazing new friends from Bonaire
With Boston Sea Rovers intern Sofia Butler, showing off our cool camera rigs. It was so awesome to share the experience with a fellow intern!
My dive buddies from the Pressure Drop boat…such a privilege to spend two weeks with these amazing people! Photo credit: Jen Penner
“Here is your country. Cherish these natural wonders, cherish the natural resources, cherish the history and romance as a sacred heritage, for your children and your children’s children. Do not let selfish men or greedy interests skin your country of its beauty, its riches, or its romance.”
-Theodore Roosevelt
Mammoth Hot Springs, Yellowstone
Theodore Roosevelt, 26th president and conservationist, was credited with playing a momentous role in establishing and supporting numerous National Parks. He was also a strong advocate for Yellowstone National Park, the first and oldest National Park in the United States. Now, over 150 years later, I finish up my internship and also my 100th dive in this same park. Yet, none of this would be possible without the foresight of Roosevelt and numerous others for our nation’s wilderness to be conserved for the enjoyment of the public and future generations.
This week I join Brett Seymour and Jim Nimz with the Submerged Resources Center (SRC) for their work in Yellowstone. Since the 1990’s Yellowstone park biologists like Drew MacDonald have been managing invasive lake trout species. Biologists realized that introduced lake trout weren’t just growing and reproducing at much faster rates than native cutthroats, but they were also voraciously eating the native cutthroats. Since 1994, over 4.5 million lake trout have been removed from Yellowstone Lake using gill netting (NPS). Brett and Jim are diving Yellowstone Lake to install dissolved oxygen monitors where the lake trout lay their eggs. The park drops over 40,000 pounds of specialized plant-based pellets each year over lake trout spawning grounds. These pellets only target lake trout and smother their eggs, preventing the next generation of rampant predators from wreaking havoc on the Yellowstone ecosystem.
Jim installing a dissolved oxygen monitor. Photo Credit: Brett Seymour.
While the native cutthroat may seem like just a single species residing within the boundaries of a massive park, they too have a special role that is intertwined with the rest of the ecosystem. Invasive lake trout mostly exist in the deeper parts of lakes, out of reach of predators, and cutthroats spend much more of their life in shallower areas, eventually swimming up streams as part of their life cycle. This distinction between the two species is important, because it means cutthroat are an integral park of nutrient cycling within Yellowstone, while lake trout are not. Many other animals suffered from the decline in cutthroat, and this fish now serves as a story of hope within Yellowstone as grizzly bears, bald eagles, and numerous other species have been spotted in greater numbers feeding on recovering cutthroat.
Jim and Brett bury the dissolved oxygen censors in anticipation of lake trout spawning, where they will later be removed after the pellets have been dropped, and then we move on to the next dive site. While Yellowstone sits over a super volcano and many geothermal sites, this lake is not a wetsuit diving temperature. While I’d used a drysuit before, it was only for checkout dives, and had been a long time ago. My first dive in Yellowstone will be off the shore of West Thumb, where I can get my buoyancy and trim dialed in with the added bonus of getting to look at amazing geothermal vents at the same time.
Cross section of a geothermal spire.Me checking out a geothermal vent. Photo Credit: Brett Seymour.
This underwater ecosystem is different than all diving I’ve done with this internship, with neon green filamentous algae carpeting the bottom of the lake. At first, the somewhat limited visibility seems a result of particulate matter in the water column, but upon closer inspection, it is actually thick clouds of shrimp-like isopods swimming around. Even bigger ones munch on the bright green algae, and when I hand one to Jim, he (pretends?) to eat it. As Jim keeps a very watchful eye on his new drysuit diver, Brett directs me over a geothermal vent for a photo… and I am quickly distracted by a large isopod that shoots by me. Sorry Brett!
Jim getting lost in the algae. Photo Credit: Brett Seymour.
After proving I’m not a liability in a drysuit (somewhat to my surprise), we head over to our final dive spot of the day, and also of my internship. The night before, as I was catching up on logging my dives, I had the rather unbelievable discovery that my 100th dive would be the next day. I can’t think of a more fitting place for my 100th and last dive of the NPS internship and than the ancient dormant geothermal spires rising up from the bottom of Yellowstone Lake. While coincidences might happen all the time, I’d like to think this was meant to be.
We descend into the green water of the lake, visibility limited because of the algae diatoms crowding the water column. I’m still acutely aware of my drysuit, and how I’m not used to it, focusing on adding the right amount of air as we slowly sink down. Then, all of the sudden, I look to my left at an incredible formation of rocks rising from the bottom of the lake. Some are jagged as they shoot up, while others seem to have a more gentle, looping flow as they rise towards the surface, more reminiscent of their given name “spires”.
Perhaps my favorite picture of me ever! Photo Credit: Brett Seymour.
It is such a privilege to have the opportunity to see these incredible formations that much of the world doesn’t even know about. Yellowstone is a magnificent park, and I realize that it has as many hidden wonders as it does famous sites. The spires are dotted with unique looking yellow sponges, and I notice little snails with pretty spotted shells alongside this surprise burst of life. The biologist in me forgets about the ancient spire I’m staring at and instead starts wondering if the snails eat the sponges, if they have coevolved in this unique micro ecosystem, and if they have even been studied at such a remote location.
Once again, as Brett is trying to line me up for the perfect shot, I probably look like I am kissing rocks as I have my mask glued to an odd looking sponge in front of me. Thankfully Jim gives me a good natured shove and I turn to see Brett patiently waiting with his camera. As we end our dive floating at our 20 foot safety stop, I have fun waving my hands in front of my face, grabbing handfuls of isopods as a time. Too soon, we are back at the surface, and as I start blabbering about the sponges and snails, someone asks “did you even look at the spires?!”. Well of course I did! Even if I got a little distracted.
And with that, I finished my last dive for the OWUSS NPS Internship!
The rest of the park is spectacular to behold, and even in our short time there, we see elk, bison, bighorns, mule deer, black bears, coyotes, and even a grizzly and her cub. It is no wonder that generations have continued to be drawn to the immense grandeur, diverse terrain, and wildlife found within its borders. However, there is a narrative that parks are doing better than ever because more and more people visit each year. While it is wonderful that the public continues to grow and show interest in Yellowstone and other parks, this isn’t the most accurate representation of what our parks really look like.
What they currently look like is understaffed, underfunded, and under-appreciated. My previous blogs might have been lighthearted approaches to the day-to-day of park diving operations, but there has also been a bleaker underlying narrative. While parks have struggled with staffing and funding cuts across numerous administrations and political parties, it is no secret that they are struggling now more than ever. Reduction in Force (RIFs), illegal probationary firings, and massive funding cuts have stripped parks of resources required to function for their basic missions. But it isn’t just these large actions that have seriously undermined the parks. Even smaller actions such as reducing purchasing capacities within parks means that parks have the money to carry out operations, but no way of actually spending it. It seems to me that this isn’t saving our country any money, it just means our tax dollars are sitting in some nebulous federal vacuum while our parks struggle to serve the public in they way they were designed to be.
Photo Credit: Brett Seymour
Before this internship experience, I didn’t know much about who worked in parks or how they operated. I was horrified to learn that so many park employees were fired or forced to retire in the spring of 2025, but I didn’t have a grasp of what this really meant. From facilities to firefighters, parks lost the dedication and talent of those who keep our parks pristine and sanitary, keep them safe and protected, and so much more. Hardworking custodial staff, mechanics, educators and so many others have recently been lost from our parks. So while I mostly interacted with biologists and rangers during my internship, I would like to point out that it is only through the hard work of all within the park, that they are the places we are proud of today.
While all of the firings and funding freezes were enacted by the Department of Government Efficiency (DOGE) in an effort to make the federal government more efficient, from my observations, they have only served to disrupt and destroy years of hard work. The current state of understaffing and underfunding is so debilitating, employees can barely complete everyday tasks, let alone big projects, because so much time is spent justifying every action to the current administration. An office wounded to such a degree that they don’t have the capability, resources, or personnel to perform at a high standard seems to be the opposite of efficiency. Many of the people I interacted with would be the first to recognize that there are inefficiencies within the federal government and parks. However, it seems a lot of these inefficiencies could be solved by listening to the input of those on the ground doing the job (and trust me, they all have plenty of brilliant solutions and ideas on how to do their jobs better). The reality seems to be that many decisions often come down to pressures and whims from current administrations, not input from those doing their jobs every day.
Imagine working at a park for 30 years, dedicating your career and your life, because you believe in the mission of your park, only to have to justify your day-to-day existence to an administration that accuses you of being useless and a drain on the American people. This is the current reality for many inside the parks service. I was most exposed to park diving operations, which I feel could have many misperceptions for those outside of the job. After all, many think of diving as a recreational activity, not the physically and mentally intense operating environment within parks that requires yearly fitness tests, emergency trainings, and more.
While my blogs might have portrayed diving for the park service as fun, I hope they did not portray it as easy. These people brave rough conditions, strong currents, tough weather, potentially dangerous animals, and the inherent risk of diving, all because they are so passionate about surveying and protecting the underwater resources at their park. While they love their jobs, that is not to say these are easy jobs, or fun all the time. From what I’ve seen, the joy in their jobs comes from the passion they have for these ecosystems and species, and is in spite of the grueling work from a day of diving or field work.
Mosquitos, surge, oh my! While safety is the top priority at parks, it does’t mean conditions aren’t hard to deal with.
The reality that so many chose to stay at parks under the threat of being fired, when they could have retired with 6 months of continued pay, shows the dedication and passion park employees have for their jobs. These are incredibly talented people who could easily go work for private industries with higher salaries. It’d be hard to blame someone for choosing a stable income for 6 months and the ability to make more money, rather than stay at a park they are passionate about, but where they are constantly flooded with unsubstantiated criticism from an acting administration. Not to mention, all with the overhanging dread that they could be fired at any moment.
For many of the people I worked with, to leave their park is the equivalent of the death of decades of work and essential programs that have protected and provided for our parks. Because it isn’t just loosing the talent of these incredible scientists and essential employees that will weaken our parks, it is also the ongoing hiring freezes that mean these positions can’t be refilled. Essentially, we are looking at our last line of defense between the stewardship of this country’s wilderness, and dysfunctional parks with empty offices.
Biscayne National Park
There has been an amazing movement of bipartisan and public outcry in response to threats to our National Parks, to the extent that some illegal firings have been rescinded. However, I would warn that these in-your-face, dramatic administrative actions are not the biggest long-term threats to our parks. They are simply distractions, suctioning in people’s rage and outcry, while less obvious infractions to our public lands are trying to get pushed through.
Pearl Harbor National Monument
I don’t think our parks will be bulldozed overnight. They will slip away silently. Chipped away bit by bit by permitting loopholes, lobbyists, and the slow disappearance of essential employees who are unduly fired, coerced into retirement, or recognized for their talent by the private industry. It will start with quiet, out-of-sight privatization and extraction until all we are left with are fragments of our magnificent parks and normalized environmental degradation.
Waikolu Valley, Kalaupapa National Historic Park. Photo Credit: Glauco Antonio Puig-Santana
While interacting with local, state, and federal representatives is great, it can be intimidating, and not an achievable goal for everyone. Sometimes something as simple as sharing your love for and favorite experiences in parks is just as powerful. Throughout my internship, I met a lot of strangers, whether in an Uber or airport terminal. I absolutely know that we didn’t all have the same political beliefs or vote for the same representatives, but at the end of the day, it didn’t matter. I would often describe my internship, all the wonderful places I saw and the hardworking people I met. These complete strangers would then tell me about their favorite park as a kid, or ones they hope to visit one day. One man even said he recently went to Yellowstone and his young daughter wants to be a ranger now.
I never blatantly mentioned how I think the recent firings or slashed budgets are wrong because I didn’t have to. Just hearing what a day of field work is like is more than enough for people to draw their own conclusions about who works for the parks service. They can decide for themselves that inefficient, incompetent employees don’t brave clouds of mosquitoes or withering heat. Only dedicated, passionate, hard-working civil servants deserving of jobs and public support do.
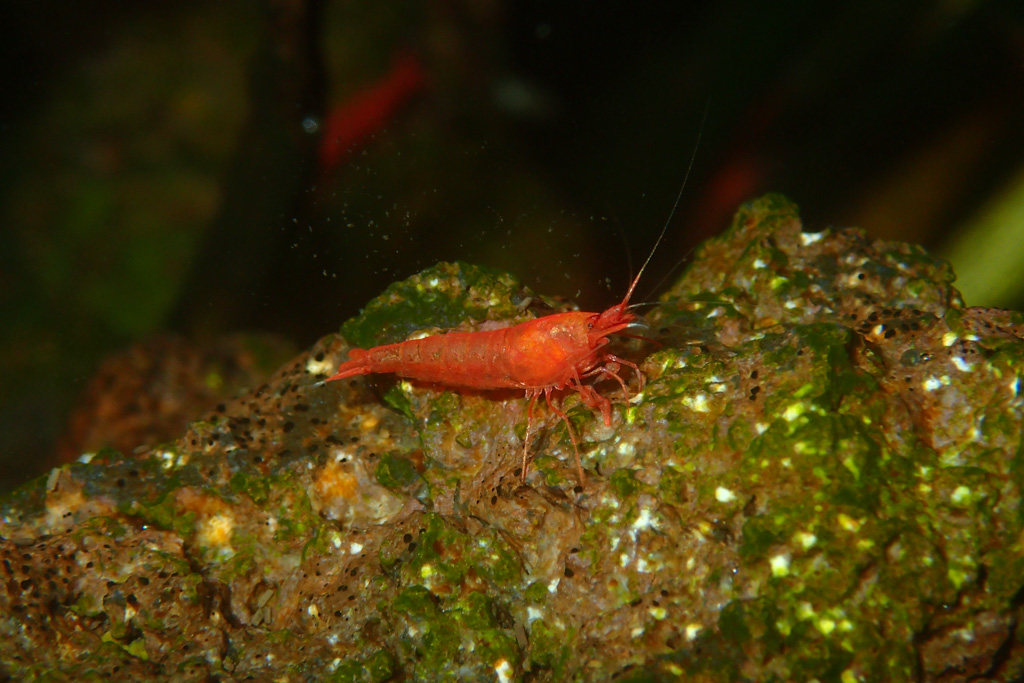
ʻōpaeʻula, Hawaiian Red Shrimp at Kaloko-Honokōhau. Photo Credit: Katie Cartee.
There is a lot going on in the world right now, and it can be hard not to feel sad or hopeless about the divide in our country. I would argue that our National Parks have long been a uniting force and will continue to be if we can keep them in the hands of the public to experience and enjoy. Even in the middle of writing this blog, our parks have been thrown another obstacle in the form of a government shutdown. Employees have been put on furlough, basically forced time off without pay, while many more are simply working with no pay. I don’t believe it should take much empathy to imagine the frustration and stress of not knowing when you will have a stable income again. Furthermore, parks have suffered in the past from vandalism, environmental degradation, and sanitation problems as they remain open during a government shutdown, but with only a skeleton workforce to take care of them.
It fills me with sadness to see these events unfold as I finish up my internship. What I have written has been from my perspective, from my observations within parks. I don’t expect everyone to believe all of it or agree with all of it. I haven’t included sources, and it’s not peer reviewed. But I hope if anything, you can relate to the wonder and excitement I’ve felt in these blogs as I’ve had the privilege of experiencing some of our nation’s marvels. They are pretty incredible places to see, and feelings to experience, ones that I hope everyone gets to share when they think about National Parks.
Channel Islands. Photo Credit: Scotty Gabara.
What I am scared about, is not the disappearance of our National Parks, but what they will look like in the future. How will our children experience them? Only through our stories? The question is not if our parks will be here in the future as the land and water will to some extent, always exist. Instead, it is how we will experience our parks. What will they look like? Wild, healthy, and free? Or remnants of a past country, lacking advocates and stewardship, exploited beyond recognition? It is up to us to decide, and there isn’t a better time to advocate for them than now. National Parks belong to all of us, let’s show that we care about them.
The National Park Rangers were created out of a need to protect buffalo in Yellowstone from poachers. To this day, they protect and preserve all of our park’s resources, heritage, and culture.
When the Submerged Resources Center (SRC) first started reaching out to parks for my internship, they asked me if I had a top choice. Immediately, I said Channel Islands National Park. Most of my previous diving experience was in the cold water around the San Juan Islands of Puget Sound. Even though the conditions were tough, I loved all of the marine life and kelp. The only thing was… visibility was never good enough to see the bull kelp as a “forest”. Ever since, the idea of lush kelp forests in good visibility has been alluring. I also had spent some time outplanting hatchery-raised pinto abalone, but had never experienced seeing an adult abalone in the wild, and was excited for the chance. Ironically, Scotty Gabara, Marine Ecologist at Channel Islands, was the first to respond to SRC that the park could host me this summer.
Ever since, I have been eagerly awaiting getting to dive alongside the Kelp Forest Monitoring (KFM) team. Now, two days in, the only water I’m in is spray from some choppy conditions. I’ll spare the horrific photos, but the nastiest ear infection of my life has been plaguing me for the past week. The night after I finished my cave course, I woke up to pain in my right ear, and proceeded to lose my hearing and bleed from my ear for the next five days, even on multiple antibiotics. I’d like to think I’m no baby, but the pain was pretty intense. Even more intense was my worry for what was going to happen if my ear wasn’t healed for the KFM trip.
I found out soon enough. Probably my fifth sentence after being picked up at the airport shuttle by Kenan Chan, Biological Science Technician and Lead Fisheries Diver, went something like “soooo, I also have a super gnarly ear infection, nice to meet you.” He assures me the KFM team is used to dealing with petulant ears, and I’m in good hands. The team has an “ear camera” on board, and while my ears were feeling much better, a quick check revealed they were far from normal. I’ll leave out the details, but everyone on board agreed my ears were by far the grossest they’d seen. Marvelous.
That’s not to say I don’t have a great time my first few days. The seasonal workers for KFM, Lizzie Mceligot, Laney White, Ryan Hallisey, Katie Riley, and Arnel Lorenzo-Orig, are all super welcoming, even though I’m about to take up more of their precious space on board. Throughout the trip, I have a lot of fun with these folks, and it’s possible we trauma bond over some technical issues discussed later. I have free range to an abundance of snacks, which is basically my dream come true after two months of careful food budgeting. Spending all day snacking and diving would be ideal, but I’m still thrilled. I try to make myself as useful as possible, helping divers in and out of the water and assisting with data topside, but to be fair, this team is so self-efficient, I’m hardly any use. I still enjoy getting to see how their diving operations work, and all the little goodies they bring up to measure, like white urchins and abalone shells. Brian Cunningham, our boat Captain, entertains me by showing me the compressor room and has an impressive sixth sense for where our divers are at all times.
The next day, I still avoid eye contact with my dive gear, but I justify a good surface snorkel. Not even five minutes in, I fall head over heels for the kelp forests. They are everything I imagined and more. With the sunlight streaming in, I have the perfect view down to the bottom. To my delight, a few garibaldi come say hello, and I am somewhat surprised by how unfazed many of the fish are by my presence. The sheepshead are especially curious and approach pretty close to see what I’m up to. At one point, a cormorant even swims below me, chasing some fish, and I can’t help but laugh through my snorkel at the bizarre sight of a bird torpedoing through the water.
Around this time, I’m starting to get a little too toasty in my wetsuit. This is my first time wearing a seal skin wet suit (and also my first introduction into wiggling into them – if you know, you know), and I am shocked by how warm I am. I head back to the boat to take off a layer and then jump back in, already missing the swaying kelp. As the sun hangs lower in the sky, the kelp turns gold, and I can’t help but think of this beautiful ecosystem as a chest bursting with treasure. Bright urchins and shards of iridescent abalone shell litter the floor like jewels, and it’s easy to see why many of these species have dwindled in number because of high demand. Just as I’m sneaking up under a seagull to see how close I can get, a large triangular shape glides under me.
Photo Credit: Scotty Gabara
Pretending to forget about my particular ear issue, I dive down to say hi to the adorable bat ray who is calmly swimming along the bottom. Ignoring the pain as I equalize, I manage to snap a few shots. Realizing that I may have pushed a little too far today, I make my way back to the boat feeling very content with my kelp frolicking.
Unfortunately, later that evening, we ran into some toilet troubles that were going to disrupt the entire trip. Bryan, Scotty, and Kenan valiantly try their best to fix the head, and all I will say is that a fair amount of buckets were involved. Sadly, our heroes remained defeated, even if the rest of us were cheering them on (from the sidelines, as far away as possible). If the world is your oyster, then the ocean became our bathroom for the night.
We headed back to the mainland the next morning, hopes high that our issues could be quickly resolved and we could get back to the monitoring sites. After some horrific troubleshooting that involved pulling apart various parts of the plumbing, our dejected heroes finally located their suspect… a sink drain strainer? While we all remain dumbfounded on how it made itself into the toilet, as obviously, no one put it in there. A leading hypothesis involves it rolling off the sink counter because of some rough conditions we had earlier in the week. I still think there might have been aliens involved, but that one was no easier to prove.
Thanks to the dedication of these three, we were able to get back out in the afternoon so the team could work. By the time Thursday rolled around, nothing was going to get between me and a dive. While my ear didn’t look particularly better, it didn’t look worse, and that was good enough for me. The kelp was calling me! Since I don’t have the species identification background to help with KFM protocols, I get to use a camera while everyone is diligently working.
If snorkeling was amazing, my dive was an out-of-body experience. I was gliding through a dreamland of swaying kelp and brilliant red algae carpeting the floor. Bright orange giribaldi flashed in and out of the kelp stipes, and the water was unbelievably clear, revealing complex rocky reef and gorgonians rolling in time to the surge. An octopus peered at me from a crevice, and little horned sharks hid among the red algae. Towards the end of the dive, I get bombed by a sea lion who charges straight at me and blows bubbles in my face before disappearing. Everywhere I look, there is an astounding amount of lush, healthy life. Kenan points out an abalone, and bubbles rush around my face as I squeal in excitement. I’m convinced that I’ve had the most perfect dive ever, and nothing will top it.
Katie hard at work.
Then, at our next site, a massive fish sideswipes me. I almost lose my regulator from my mouth as my jaw drops at the giant black sea bass that is checking me and my buddy Ryan out. After swimming right by me, it cruises on towards Ryan, who is being mimicked by a curious sea lion. Just when I think fish and sea lion are going the collide, they both shoot off in a jumble of motion. At this point, I’m yelling through my regulator at Ryan in disbelief and excitement. The sea bass is easily larger than the sea lion, and this is the point where I finally start to comprehend what a huge creature it is. Later on our transect, it glides in front of us, and I turn around to see Scotty pointing at another one that was checking out my fin right behind me. I would have never known!
One of the smaller sea bass saying hi to Lizzi. Video Credit: Lizzie Mceligot.
Even though I’ve had the privilege to see some beautiful and awe-inspiring sights, nothing has evoked this sense of prehistoric wonder like these sea bass. I felt like I swam through a time portal and caught a glimpse of the past through this majestic fish that used to roam around these islands in even bigger proportions and numbers.
It’s only because of protections from California Department of Fish & Game as well as the park and marine sanctuaries of Channel Islands that these creatures are still around. In a similar story to many other species in the area, like abalone, this fish was over-harvested to the brink of collapse. Without the careful intervention of regulations and protective policies, there is a very real possibility I would have never been able to experience them (NPS). Laney tells me about a sea bass at another site whose mouth is mangled from fishing gear, and I am filled with immense sadness imagining the peaceful beasts I had encountered meeting the same fate. While frighteningly big, there was something compelling in the way they slowly stared at me with their huge eyes. These fish have a lifespan similar to humans, and I wonder at all they have experienced and survived over the years to make it where they are today, watching a gaggle of divers measuring urchins.
Friday, my last day with KFM, we dive the lighthouse at Anacapa again. I descend this time with Laney as my buddy, and while I never get a visit from the sea bass again, the sea lions don’t disappoint. As Laney is focused on completing her surveying, sea lions and the odd harbor seal cruise by to take a peek at us. Soon enough, I’m distracted by the beauty of the small. Spanish shawl nudibranchs cling to rocks, and I laugh as the raised structures on their backs stream behind them as they are whipped back and forth in the strong surge, like some underwater roller coaster ride. A shy octopus braves my camera to leave its hidey hole and meander between some boulders, giving me a somewhat accusing eye as I follow it.
Laney doing her bands survey.
Towards the end of the dive, I run into Kenan finishing his band survey with an inquisitive sea lion hanging nearby. Of course, the sea lion was more interested in harassing the person working, not holding the camera, but it eventually came over to investigate. I spent the end of the dive playing hide and seek with it. It would watch me from the kelp until I’d pretend to ignore it, and then all of a sudden it would come zooming by, doing somersaults in my face. I noticed if I leaned to one side or the other, it would sometimes mimic me, which was adorable! This experience filled me with so much joy and was an awesome way to end my diving with Channel Islands.
I spend my last hour out of my gear, holding onto the tagline and drifting in the current. Dozens of sea lions play beneath me, and then they burst out of the water as they move on to their next source of entertainment. Brown pelicans fill the busy sky around the lighthouse, and the odd peregrine falcon soars by the cliffs. From sea to sky, the Channel Islands are truly a paradise, brimming with unique life, all benefitting from the park and marine protection areas, and the incredible long-term surveying efforts of KFM teams.
Ryan, Lizzi, Laney, and I under a swim-through arch next to the transect! Photo Credit: Scotty Gabara.
If there is one place in the world I absolutely don’t want to be, it’s in a cave. Specifically, an underwater cave. So how is it that I find myself winding my way through a system called Devil’s Eye, trying to have perfect buoyancy and convince myself that I’m not a complete idiot with a death wish? I’m still not sure, but three months earlier, when Brett Seymour of the SRC asked me if I wanted to participate in this Cavern, Intro to Cave, and Full Cave diving course, the words “thanks, but absolutely not” were on the tip of my tongue. Somehow, I ended up asking if I could have more information instead.
The rest is history. Upon learning that the course would be very comprehensive, with other NPS divers, and led by a highly recommended instructor, I realized this opportunity was too good to pass up. Even though I find no intrinsic motivation to enter a cave whatsoever, I want to become a better diver which this course absolutely facilitates. With that, I tell my family that I will be diving in “springs” in Florida and start to nervously count down the days until I start the course.
Our first day is mostly spent reconfiguring our gear. I was switching over my harness to a new double wing BCD as well as reconfiguring a lot of my hoses and regulators. Photo Credit: Josh Thorton
I meet our instructor, Josh Thornton – a well-known diver, cave instructor, and co-founder and President of Subgravity – who has worked with the SRC in the past. I also meet the two NPS divers. Regional Diver Officer for the Pacific West Region, as well as Fisheries Biologist for Crater Lake is also named Josh (Sprague), which might make this blog a little confusing. Amelia Lynch is the new Park Dive Officer for Devil’s Hole in Death Valley National Park. Devil’s Hole is a very unique cave system that is home to one of the world’s rarest species of fish: the endemic Devil’s Hole Pupfish.
Devil’s Hole Pupfish… so cute!!! Photo Credit: Brett Seymour
Devil’s Hole is interesting in that it fluctuates with tides and is impacted by earthquakes that occur thousands of miles away. This isn’t the best news for the pupfish, who rely on a very delicate ecosystem for sustenance like algae, and have recently struggled in the wake of some earthquake disruptions. It’s critical for park divers, like Amelia, to conduct regular counts to monitor changes in their populations. The only thing is, they live at the entrance of a cave system that extends thousands of feet down. This means Amelia needs her Intro to Cave and Full Cave Certification before the next pupfish count (spoiler: both she and Josh S. absolutely crush the course).
Devil’s Hole in Death Valley National Park. Photo Credit: Brett Seymour
Amelia rocking the doubles.
My feelings about caves aside, I was already set up for a challenge with all the new equipment configurations we’d be using, especially the extraordinarily heavy steel doubles. The first day of diving, my fins are too light, my trim is off, and I spend most of our three-hour dive face-planting into the sand. With a different pair of fins on the next day, I had a much easier time with my buoyancy, but that is not to say it wasn’t a struggle. Pair this with a blindfold over my mask, and that’s how I ended up crashing into my buddies and every single dang rock within range of our line.
Slightly too buoyant and surrounded by pitch black, I am enveloped in an overwhelming sense of vertigo. At first, I manage to breathe calmly and try to regain my buoyancy after swimming in circles and rolling with my tanks, all with the line clenched in my hand so our instructor can’t bat it out of any loose “ok” grasps. Then, I grab a rock to steady myself, and I realize I’m not swimming in circles. Instead, it’s just the sensation of my head going round and round on a merry-go-round, with the feeling of the heavy centrifugal pressure pushing against my skull. I keep my breathing as steady as I can, but head pounding, I feel ready to get rid of my lunch. Finally, I rip the blindfold off, signal I am stopping the drill to our instructor … and stand up in…five feet of water.
Except for the entrance to the cavern, Ginnie is pretty shallow.Before even getting in the water we practice dry, blind exits. Photo Credit: Josh Thorton.
At this point, I haven’t even entered an overhead environment and am no closer to wanting to. Our first journey into a cave is in Orange Grove at Peacock Springs. After the crystal clear water of Ginnie, I was mentally prepared to be able to see straight through the springs to the cave entrance. To my utter delight, Orange Grove was absolutely covered in duckweed, to the point that anyone passing by would assume it’s a shallow pond if not for the “warning, people have died here” signs. Less than thrilled, I descend with the group into murky green water, trying to spit the duckweed in my mouth out through my regulator. Even though the visibility was astounding inside the cave, I was pretty miserable unless it was my turn to practice laying the line. With nothing to focus my mind on, I spent the agonizing minutes imagining catastrophic scenarios inside the cave. I have a pretty good imagination.
Once all three of us had practiced laying the reel, Instructor Josh took us on a short little jaunt into the actual cave. I hated every single second of it, and even though my body wasn’t telling me something was wrong, my mind was. Every single thing I’d previously heard about how dangerous caves were, even to experienced divers, crowded the front of my mind, and I kept asking myself, why am I here? When we surfaced, the first thing I said to Instructor Josh was “I don’t think I can go in a cave again.” In his usual way, he smiled reassuringly and gave me a neutral “okay,’’ leaving the decision up to me.
I got out of my gear and sat on a ledge above the cave, letting fish nibble on my toes and watching a rat snake hunt lizards. Bathed in warm sunlight, surrounded by the lush foliage of the springs, I felt so much joy in watching these simple things. I could barely sit still as I watched the snake nab an anole and then oscillate its body to digest it. At this moment, an even bigger question began to form in my mind. If such small, simple things bring me so much happiness and wonder, then what the hell was I doing in a cave when it didn’t stir the slightest excitement in me?
Toe chompers.
The next few days are a roller coaster of me forcing myself into caves and then calling it quits in the middle of dives. At least two or three times a day, I’m convinced that I’m absolutely done, and I can’t push myself further. The thought that I’d make myself go back in a cave is an impossibility within my mind during these moments.
To the credit of Instructor Josh, Amelia, and Josh S., no one pushed me into doing anything I didn’t want to, and everyone was incredibly supportive and positive with me throughout the class, which I believe speaks to the caliber of people I was with. Amelia needed to complete this course for her job at Devil’s Hole, and even though I constantly worried I would slow down the group, and therefore her progress, she always made me feel better after I brought it up. Both she and Josh S. were very supportive team members and were kind enough to figuratively hold my hand through some of the course (though at that point, I wouldn’t have minded it literally).
Amelia had a particular affinity for the duckweed.
So many voices were competing in my head during these dives – my family, my friends, and my own, all saying various things like “cave diving isn’t worth it,” and “don’t push yourself to do things that feel wrong.” Even though my mind was telling me no, I had no butterflies, no nerves or high heart rate, just a deep feeling that I’m not supposed to be in a cave. My biggest fear about being in caves is not about my equipment, team, or instructor failing; it has been that I will freak, rip my regulator out, hit my head on the cave, and thrash about as I vainly claw towards the exit, only to die as I choke on the cold water flooding my lungs.
At the end of each day, defeat hangs around me like a somber cloud. I try to stay positive, and grateful for the opportunity, but the repeated failures chip away at me, and I am left mentally and physically exhausted. One night, I decided I was done. I had pushed myself farther than I ever thought I would go. I tried it out, and I couldn’t justify it in my mind. But someone else could justify it, and that someone was waiting for me back at the lodging. Brett Seymour knows me too well for the little time we have spent together, and he knew that I had it within me to push even further.
We spent a few hours talking about my experience with the class so far, and his very similar experience when he originally took the class. We talked through which parts of cave diving were scary to me, and what mitigations were in place. Even though it felt like I was super unsafe, if I could change my mindset, I would realize that all the situations I was imagining were very unlikely. What is the only true emergency in cave diving? Running out of air. How is this mitigated? I can share air with three other very competent divers, and we are all diving conservatively with the rule of thirds. We all run through or lose our three lights? We can hold the line and follow directional arrows out, and Instructor Josh knows every inch of these cave systems. I freak out, rip my reg and mask off, and try to bolt for the exit? Instructor Josh has the skills and experience to manhandle me to the surface alive. We went through many more scenarios, and Amelia and Josh S. were also incredibly helpful in pointing out the things I had done well within the class, which was encouraging because I was only focusing on what I did wrong.
My first time “leading”. The realization that the quicker I breathe down my first third, the quicker we turn around was life-changing. Photo Credit: Josh Thorton
I realized that whether or not I could continue had nothing to do with my diving skills and everything to do with my mind. If I wanted to try to push through, I needed to consciously choose to switch my mindset. Otherwise, keeping the same questions and doubts was only hindering me. I’ve never been a quitter, and I didn’t want to start now. That night, as I lay in bed, I started practicing turning off the fears that had been ruling me. It didn’t mean they weren’t valid or real risks, but I couldn’t keep over-analyzing them. I showed up to Ginnie the next morning with a positive attitude and ready to try again (both novel feelings for the week).
Josh S. doing a dry run of a lost line drill. Photo Credit: Josh Thorton
We started the day with a dry drill on how to find a lost line in a zero visibility situation. For some odd reason, I found this drill kind of fun, probably because I found the line and partly because I got to root around in the dirt and trees looking for a good place to tie off my safety spool. I also had amazing luck, clamping my hand down right on the directional arrow when I found the line. I gave myself a good pep talk and we descended into the roaring flow of Ginnie Springs, ready to practice a blind exit. But this time, we were in the catacombs, much smaller and more confined spaces than before. It was almost like the negative thoughts pressed into my mind as the walls pressed closer to my body.
You might be hoping to hear that this was my big turning point, and I succeeded in pushing through and finishing the dive. I didn’t, and I called the dive once again. Amelia and Josh S. needed to complete this skill for their jobs, and I had potentially wasted their air so that they wouldn’t be able to go back and complete the drill. Thankfully, this wasn’t the case, but I felt like it was selfish to keep trying to go on dives, but then calling them halfway through. I realized that if I was to go on another dive, it had to be all or nothing. No more tepid, “I’ll turn around when I’m uncomfortable” mentality.
I’d wrestle a gator over entering a cave any day.
I dejectedly ate my peanut butter sandwich and considered texting Brett to tell him, “thanks for the pep talk, but I failed anyway, and I’m done.” A mixture of being too lazy to walk to the car and not wanting to let him down had me put off the text until later. As the team talked through the plan for the next dive, the stakes were slightly lower in my head (an example of how my mind is biased because they were basically the same). We wouldn’t be in such confined spaces again, and the drill would be at the beginning of the dive. I knew if I had a task to focus on immediately, I would spend much less time psyching myself out. The task at hand was finding a lost line blindfolded, and the fact that this didn’t faze me half as much as just having to swim through a cave with nothing to do should tell you a lot about how my mind functions.
This was my all or nothing moment, and I entered that cave ready to give it everything I had. It’s amazing how this changed my perception of the dive. Even just swimming to the drill room was a better experience because I could focus on prepping myself for the task. I took note of the flow direction, the shape of rocks, and the height of the line as we swam. When Instructor Josh handed me the blindfold, I calmly slipped it on and began the drill after he had disoriented me.
I actually felt more at peace than I had all day as I searched for a place to tie off my safety spool and begin my search in complete darkness. I focused on keeping my breathing steady and methodically sweeping my arm as I headed out in the direction I thought the line was. Because the room wasn’t too big, I figured I could head straight out and then in the opposite direction if I didn’t find it. An expanding circle search would have been time-consuming because of the variety of large boulders within the room. With a combination of good instinct and a lot of luck, I found the line within a few minutes, once again right at the directional arrow, which we all had a good laugh about later.
Laying a jump in Peacock. Photo Credit: Josh Thorton
Looking back, I think this was my defining moment. I didn’t lose my cool, followed my instinct, and completed a tough skill. I even had my primary light go out a few minutes after the drill ended, but was able to deploy one of my backups unfazed. I had successfully shut off the unhelpful parts of my mind which had been the biggest challenge of all. It never got any easier for me to convince myself to go into a cave each dive after (I still absolutely did not want to), but I had much better experiences during the dives. I might dare to go as far as to say that I just-possibly-almost-slightly enjoyed my last few. This might be my longest blog, and I don’t even think I came close to describing how difficult this experience was for me, and how hard it was for me to push through. While I hope to never use this certification (although I would change that stance if I was ever fortunate enough to dive Devil’s Hole), I absolutely will use the skills I developed in the course on every dive from now on. As for shutting the unhelpful parts of my mind off… that might still be limited to the caves, but at least I know I’m capable of it.
I finally completed my blind exit on our last dive. While it looks like I have a lot of things dangling off of me, all gear from cutting tools to lights are tucked in and attached at multiple points to be as streamlined as possible.
I’ll end this blog by once again reiterating my thanks to the people who helped get me through some pretty tough mental blocks. Josh Thorton was the most considerate, encouraging, and positive instructor, even when I said to his face I hoped to never use his certification. I am a much better diver because he was willing to put up with all my agonizing about how horrible caves are. Josh S. and Amelia are really awesome divers and such great role models to look up to, not just in terms of their skills underwater, but the environment they foster within a team. And Brett and Jim… well, I guess they also helped me out. I realized if they could survive each other in a cave, then surely I had a good chance of making it out alive too.
Now that I think about it… I might be willing to go in a cave again. Just maybe.
My first splash into the coast off of Kalaupapa is disorienting. I am unable to put my finger on what feels different as I snorkel through beautiful coral heads and ancient volcanic flows. When I surface to check back on the shore, the wind echoing in my snorkel is the only sound to be heard. Eventually, I come to realize that the odd silence at the surface is because the ocean here is loud.
A common sight on my evening snorkels.
I dunk my head back under the water, and sure enough, a cacophony of popping, crackling, and creaks meets me. For such a slow realization, it is a pleasant surprise. I often find the ocean to be soothing because of its relative silence. Compared to the bustle of life on land, it’s a haven where everything quiets and slows (and people can’t talk to you!). Listening to the chorus of snapping shrimp, whistling dolphins, and crunching parrotfish is a gentle reminder that the ocean is also full of bustle and noise, and the silence is often a consequence of humans. Kalaupapa is renowned for its abundance of fish and marine life because of the careful stewardship of those enforcing its designation and protection as a National Historic Park.
A Hawkfish giving me the stink eye from its coral head.
While Kalaupapa is a refuge for marine life, it hasn’t always been for people. In the late 1800s, those with Hansen’s disease, also known as leprosy, were exiled to Kalaupapa and forbidden from leaving (NPS). Thousands of people suffered in this remote place, separated from their families and struggling to survive with little assistance before a cure was found. People like Mother Marianne from the Sisters of St. Francis and Father Damien (both now Saints), along with the support of Queen Kapiʻolani, are credited with taking care of the patients and improving their quality of life when no one else would. The story of Kalaupapa is complex, so while its designation as a National Historic Park has had tremendous benefits for its marine ecosystems, it is important not to forget why it was established in the first place, and the stories of the people who suffered and persevered here.
While the first patients might not have felt welcomed by the barren shoreline they were abandoned on, they were helped significantly by Native Hawaiians who had been in the area cultivating the land for centuries. Without this compassion and aid, many feel they wouldn’t have survived long.
Those who currently reside in Kalaupapa do an amazing job of keeping the history alive. My first day, Biological Sciences Technician Glauco Antonio Puig-Santana introduces me to a group from Sustainable Coastlines Hawaii (SCH), and we visit the current Sisters to learn more about the history of Kalaupapa and the roles past Sisters and Mother Marianne played in taking care of patients. Glauco and Sisters Alicia and Barbara-Jean give me a warm welcome, answering my questions and ensuring I am informed and respectful about Kalaupapa, past and present. I only spend a short amount of time with SCH, but enjoy getting to meet such wonderful people. Even after they leave, evidence of their hard work stays in Kalaupapa. The coastline looks pristine after the countless hours they’ve spent removing marine debris, and helicopters are needed to fly out the massive bags they’ve filled with thousands of pounds of trash.
The “super sacks” filled with marine debris to be air-lifted out.
I start out the week tagging along with Glauco on some Hawaiian Monk Seal surveys. It is a real treat to get to see these endangered mammals, with a population less than 1600, happily relaxing on the beach. We identify the individuals and record their locations, staying a safe distance and noting mom and pup pairs and any obvious changes in health. They completely ignore us, preferring to sunbathe on the sand, occasionally rolling into the ocean to cool off. The thought occurs to me during surveys that I’d make an excellent monk seal.
Glauco taking a photo of a mom and pup pair. I felt like I was playing the “is it a rock or is it a seal” game the whole time.
One of the unique things about Kalaupapa’s geography is that it is entirely isolated from the “topside” of Molokai except for one very steep 3-mile trail that has an elevation gain of 1600 feet. Many in Kalaupapa opt for this butt-kicking hike to reach family or friends rather than a costlier flight that is the only motorized transportation to topside. I can confirm that you feel every foot in elevation change as you ascend, and your knees definitely feel it on the descent. What is mind-blowing to me is that almost the entire 26 switchbacks of the trail are made up of cinderblock like steps that would have had to been carried down and placed by hand. Thanks to this astonishing work, I have a great hike along the trail with amazing views of the island and the settlement of Kalaupapa.
Later in the week, we head out for some diving to finish up benthic surveys sites for the park. Petrisha Alvarez from Division(s) of Land & Natural Resources (DLNR) and Aquatic Resources (DAR), joins us from topside Molokai to be our very awesome boat operator for the day (via the steep trail, thanks Trisha!). I was warned earlier in the week that the beguiling calm seas of the West side of Kalaupapa turn into the not-so-fondly named Barf Boulevard around to the East end. Even in the relatively good conditions of our low-wind day, the swells are large, and the shoreline cliffs are continuously being swallowed by white froth. I have a newfound respect for the dedication of the people who do marine operations in Kalaupapa. The East side is no walk in the park, and it takes some serious determination and boating skills to get work done.
The day starts off with the most perfect rainbow I’ve ever seen!
We hit four sites off the coastline that still need benthic surveys, and make the call to wait for safer conditions to dive the fifth, which is closest to the rocky shoreline and still getting pounded with surf. We also take water samples to be sent off for analysis. I only mess up one compass heading and break a sample syringe at depth so all in all it’s a pretty good working day if you know me.
Am I thinking about Jurassic Park or taking water samples? Photo Credit: Petrisha Alvarez
Finishing up a day on the water in Kalaupapa is not as simple as docking the boat, unloading, and rinsing off. All I will say is that the Blue Card swim tests and skills are a piece of cake compared to the shenanigans (safe, of course) required to unload gear, rinse the boat, and secure it to a mooring buoy. I’m now convinced there should be a Kalaupapa Card swim test.
Later, we pull out backpacking gear and start running through checklists to make sure things are ready for stream surveys. In case I hadn’t already proven my adept skills during water sampling, I spill a fair amount of camp stove fuel, and we end up testing them all on the ground so I can safely get some practice before people actually need me to cook dinner.
Even though I was afraid I’d burn my eyebrows off with the MSR can-stoves, I’ve since fallen in love and totally want one of my own. Bob the cat supervises everything I do, from washing my gear to checking emails.
After a week that flies by at Kaloko-Honokōhau, I’m back at Kalaupapa to join their annual stream surveying trip. I have a little free time in the office Monday, and I get to practice conducting a monk seal survey on my own. This works out great for me because I can sit and watch them as long as I want. To add to my ineffective time management, I spend half an hour watching a group of blacktip sharks cruising around the shoreline. I also quickly learn that the seals must know who Glauco is. My previous survey with him, they completely ignored us, and we could get close enough to read the tags on their flippers. Surveying by myself, well over twice the distance away than I was the last time, I quickly learn that I’m an outsider.
While I stay far enough away to not disturb them into moving, every single seal I encounter watches me with interest, very different than the laid back beach bums of the previous survey. Needless to say, getting the tag ID without bothering them was next to impossible, and I was only able to ID a few. Still, I thought it was pretty cool that they were so in tune with their surroundings to be able to differentiate between people (even if they appear to mostly be snoozing).
I can often be found in a similar position on the beach.
At one point, I encounter a very small weaned pup enjoying playing in some tide pools. I spend another thirty minutes watching it splash around and blow bubbles in the water for what appears to be its own entertainment. I can’t find the red tags on either of its flippers, but I do notice it has a unique bleach spot around its left hip area. Glauco gets very excited when I show him a picture later, and he identifies the pup as PM11 from the bleach spot. This seal pup hadn’t been spotted for a couple of weeks, which was worrisome, so it was a great feeling to know it was still alive and in the area.
PM11 was probably the cutest monk seal I encountered, spending lots of time goofing around in the water. I’m glad this spunky little guy survived his first few weeks on his own.Later, I have a cool encounter with one near the dock. Just as I was entering the water at the ladder this young male (K10 if you can read the bleach mark) popped up right next to me.
Soon, it is time for the much-anticipated stream survey. Getting to hike, camp, and survey streams in the lush valley of Waikolu is a dream come true for me. It is also a surprisingly full-circle experience that I definitely did not get emotional about. I spent my childhood snorkeling in streams in Western NC, looking for crawdads, salamanders, and the elusive hellbender (fly fishers absolutely hated to see me coming). While I loved my freshwater critters, I was always dreaming of getting to see marine life and eventually “have a job outside”. The realization that I now get to do both is surreal, and it’s possible I tear up more than a few times thinking about it. I feel so privileged to have this experience, and I know that younger me would be so thrilled and proud to learn that she still gets to enjoy her favorite pastime as work!
Spot the difference!
To get to our base camp, our team has a short but slow going hike across a stretch of rocky shoreline. It’s paramount that every step on a boulder is carefully executed because it’s not the time or place to be nursing a sprained ankle, or worse. Our leads, Glauco and Anne Farahi, Hawai’i Volcanoes National Park Biological Sciences Technician, casually mention that besides the rocks, goats and other wildlife can also fall off the cliffs we walk under. For a while, I thought they were just trying to scare us into diligently wearing our hard hats for the whole hike, but upon our return hike, we stumble across two deer that had met this fate. I don’t think my hard hat would have been much help, but I’m glad we have them.
On our way to brave the goats and rocks. Don’t worry, Anne had a hard hat too!Park Aviation Manager, Mark Wasser, helping us with helicopter operations to transport survey and camp gear to our site. Photo Credit: Mark Wasser, Glauco Antonio Puig-Santana
Waikolu, like the rest of the park, is stunning. Our base camp sits at the mouth of the stream, under the watchful gaze of steep mountains. I can’t even express how excited I am to unzip my tent each morning and look at the view outside, often decorated with a rainbow or two. We start each day with a safety review and briefing, and then fight Anne to make sure she doesn’t sneak all the heavy equipment in her backpack before heading out.
Our team also includes Trisha and Maria Angst from DAR, and Olivia Ponchin and Searrah Bierker, who are Scientists in Parks Interns from Volcanoes National Park. I feel a little useless when we arrive at our first site because I don’t have much field experience in any type of stream survey. However, the team is super competent, and everyone is incredibly helpful in teaching me the protocols as we work. I’m so grateful for everyone’s patience while I get to learn hīhīwai (freshwater snails) surveying protocol, water quality measurements and sampling, pebble surveying, and flow tracking. The hīhīwai surveys are easily my favorite because they are basically a treasure hunt for adorable snails within randomized 1/4 meter quadrats. I was especially enamored with them because they remind me of abalone, a marine snail I’ve spent some time with in a past internship.
Maria and I learning hīhīwai surveying protocol. Liv in the background is a FlowTracker wizard. Photo Credit: Anne Farahi
The Inventory and Monitoring Division (I&M) was established out of a need for National Parks to receive standardized research, as the parks themselves are often limited to devoting their time to managing day-to-day public interactions and natural resources. This division provides the parks with science that can be used for management decisions. The stream surveys are impressive to me because they take a holistic approach to monitoring, so that data can be viewed in a way that tells the story of the stream ecosystem, not just a singular aspect. While gaining a better understanding about a particular species or physical function is great, research can often fail when it comes to painting a bigger picture. When only specific topics are focused on, it is often difficult or impossible to combine that with data from another topic in a meaningful way. This is often because data sets aren’t collected ways that are consistent with each other in terms of location, date, time of day, sampling method, etc.
Searrah looking for snails in the quadrat. Because survey points are randomized to reduce bias, quadrats can be in tough locations with some white water and high flow.
I&M protocols are different and focus on collecting data in a way that can be combined into a better understanding of the big picture of an ecosystem. For Pacific Island Inventory & Monitoring Network (PACN) stream surveys, one overall survey site in Waikolu includes multiples smaller surveys from fish ID to water flow. The culmination of these “mini” surveys can be informative about that specific location or combined with the rest of the sites to tell a story about the stream as a whole. Then, entire stream systems across Hawai’i can be compared to each other because all were surveyed using these protocols. Furthermore, each protocol (fish, water quality, etc.) fits smoothly in the overall site survey, which is evident in the way different surveys can be split among teams and carried out simultaneously without getting in the way of each other. Even better, because they are all completed within the same timeframe, they are relevant to each other and have less variability.
I didn’t find any cuties my quadrat. Photo Credit: Anne Farahi. Liv showing me how to use the FlowTracker. Maria measuring a pebble. Anne completing her fish survey.
While this may not sound the most exciting to people not interested in data collection and management, what is exciting is how it can be used. Waikolu stream has been surveyed since 2007 with these excellent, in depth protocols, and this data has been pivotal in monitoring long term stream health, providing a benchmark for other Hawaiian Streams, and justifying policy implementations to benefit the streams (DLNR). Call me a nerd, but that should be exciting to anyone.
Measuring a boulder with a ruler is rather unfortunate but necessary when you run out of transect tapes. Photo Credit: Searrah Bierker
When I say it was too soon that I had to leave, I mean it was wayyyy too soon. I had such a blast surveying with this awesome team of ladies (plus Glauco), and learned so much. Like how hīhīwai are adorable and FlowTrackers are really easy to mess up. I’m proud that I didn’t cry in front of everyone when it was time for me to hike out early with Maria, but I sure felt like it. Maria was an awesome and fun hiking buddy, and minus the dead deer and a few feral pigs we spooked off, we had an uneventful hike back to the settlement.
If anything, this internship has shown me what kind, welcoming, and extremely dedicated people work for the Park Service. After spending two days measuring pebbles in icy water, they will also spend the next five days measuring more pebbles, sleeping on the ground, and eating tamales out of pouches, all with a smile and positive attitude. I feel so privileged for the time I had with these wonderful people in such a special place. Kalaupapa definitely won me over.